Starting the Sysmac Studio
The Sysmac Studio starts and the following window is displayed.

Click the New Project Button in the Project Window.
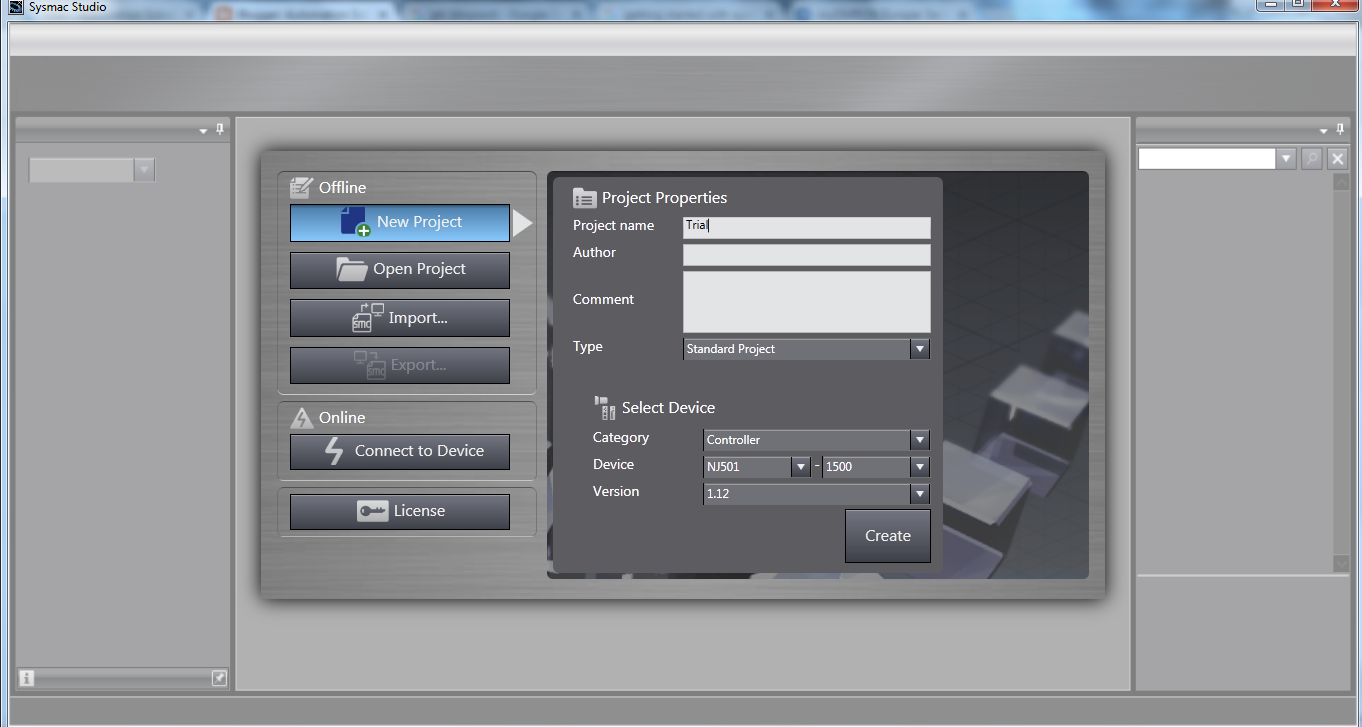
select the device category and the device to use, and then click the Create Button.

Then open Configuration and Setup tool and enter Ethercat.

Now pick and place ethercat devices from toolbox present at the rightmost portion of window
Lets suppose there is a Servo Drive R88D-KN15H connected to the network with node address 1.
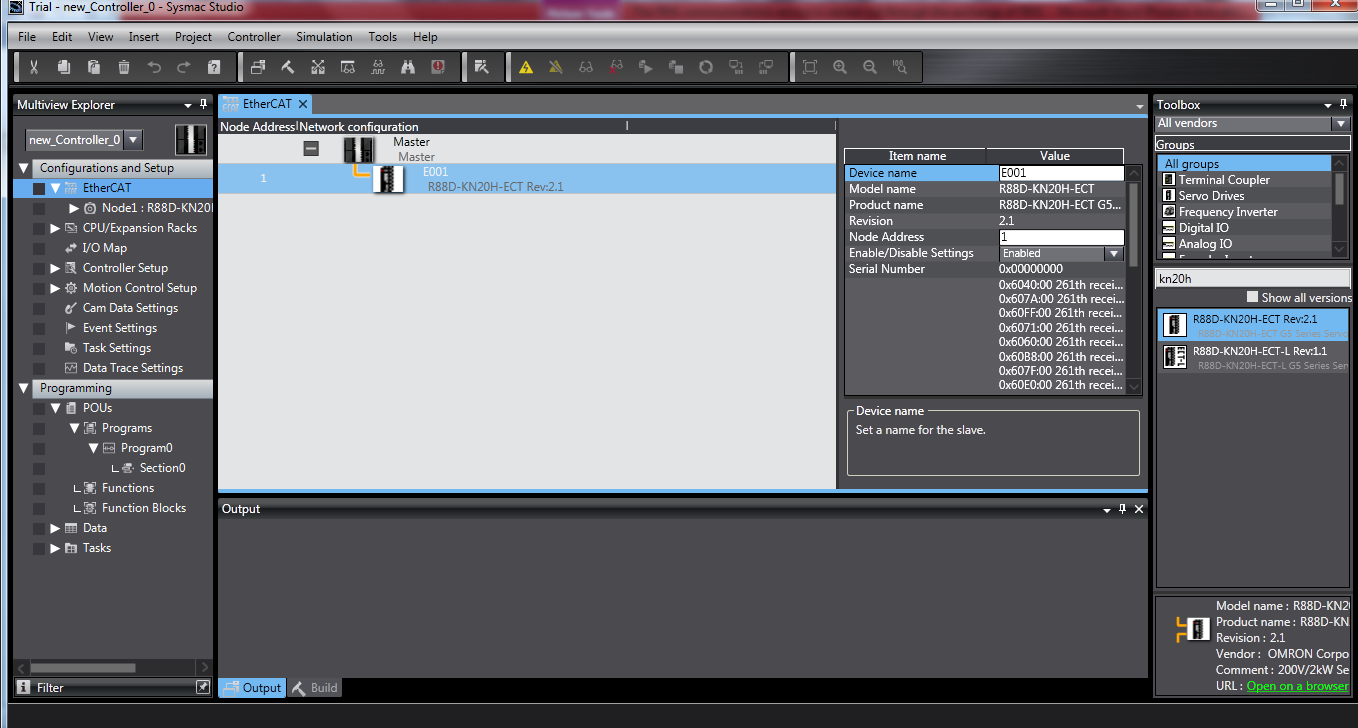
Enter the device name and node address
Now Open Motion Control Setup and an axis.

The window after axis setting add is shown below

Change Axis basic setting if required.
As Axis type from Virtual Servo Axis to Servo Axis also add Output device as node 1

After the basic setting lets come to unit conversion setting
Here in travel distance:: Command pulse count per motor rotation we will use is 1048576.
Because the motor encoder bit resolution is 20 therefore 2^20 = 1048576

Tags
Motion Controller